本文參考自“CEO來(lái)信”
在科技創(chuàng)新的璀璨星河中,總有一些熠熠生輝的人物如耀眼星辰般奪目,而宇樹科技的創(chuàng)始人王興興,,無(wú)疑是其中一顆光芒獨(dú)特的新星,。

回溯到 1990 年,王興興誕生于浙江余姚的一個(gè)普通家庭中,,這座在全國(guó)百?gòu)?qiáng)縣中占據(jù)重要地位的縣級(jí)市,,默默見證了王興興從小學(xué)到高中最初的成長(zhǎng)軌跡。


年少時(shí)期的王興興,,性格極度內(nèi)向,,宛如一只蜷縮在自己世界里的蝸牛,他幾乎從不主動(dòng)與同學(xué)們交流,,內(nèi)心常常被自我懷疑和焦慮的陰云所籠罩,。
他時(shí)常陷入對(duì)自己的深深質(zhì)疑,總覺得自己不夠聰慧,,能力遠(yuǎn)不及他人,,是典型的 “i 人” 性格代表,他的初中班主任曾毫不避諱地評(píng)價(jià),,在整個(gè)班級(jí)里,,幾乎感受不到他的存在。

王興興的學(xué)生時(shí)代,,還面臨著嚴(yán)重的偏科問(wèn)題,,他學(xué)業(yè)道路上的一大阻礙就是英語(yǔ),在一次初中家長(zhǎng)會(huì)上,,英語(yǔ)老師甚至直接告訴他父母:“這個(gè)小孩有點(diǎn)笨,。”
然而,,命運(yùn)似乎在另一方面為他打開了一扇窗,。王興興在動(dòng)手實(shí)踐領(lǐng)域,展現(xiàn)出了超乎常人的天賦與熱情,。

▲王興興小時(shí)候用來(lái)做手工的工具
初中三年里,,他憑借著自己的雙手和對(duì)機(jī)械的熱愛,嘗試手工制作微型渦輪噴氣發(fā)動(dòng)機(jī),,我們知道渦噴發(fā)動(dòng)機(jī)一般由進(jìn)氣口,、壓縮機(jī)、燃燒室,、渦輪和尾噴管等多個(gè)部分組成,,構(gòu)造精密復(fù)雜。
作為一個(gè)初中生,,竟然能挑戰(zhàn)這樣的技術(shù)難題,,絕對(duì)算得上是人中翹楚,,至于當(dāng)年的最終成品在性能上能不能比得上專業(yè)的工業(yè)產(chǎn)品,已經(jīng)無(wú)從得知了,,但對(duì)于年少的王興興來(lái)說(shuō),,這絕對(duì)是他探索機(jī)械世界的重要一步。

2006 年,,16 歲的王興興迎來(lái)了人生中的第一個(gè)重要關(guān)卡——中考,。英語(yǔ)的短板,讓他的升學(xué)之路充滿坎坷,,險(xiǎn)些與普通高中失之交臂,,好在他最終還是以倒數(shù)第一或倒數(shù)第二的成績(jī),艱難地踏入了高中校門,。
在高中的幾百場(chǎng)英語(yǔ)考試中,,他的成績(jī)慘不忍睹,大概只及格過(guò) 3 次,。這一情況也引發(fā)了網(wǎng)友的調(diào)侃,,笑稱他創(chuàng)辦的公司名 “宇樹科技”,諧音 “語(yǔ)數(shù)”,,仿佛在暗示他學(xué)業(yè)上的 “偏科”,。

但令人驚嘆的是,即便英語(yǔ)成績(jī)不佳,,王興興憑借著在數(shù)理化領(lǐng)域的卓越表現(xiàn),,每次考試的總分依然能夠排在年級(jí)前列。
高中階段,,他對(duì)動(dòng)手制作的熱愛愈發(fā)熾熱,他利用課余時(shí)間,,深入研究電池的原理,,選擇合適的電極材料,配置電解液,,制作出了可以充電的電池,,還在家中進(jìn)行電解水試驗(yàn),通過(guò)搭建簡(jiǎn)單的電解裝置,,利用直流電將水分解成氫氣和氧氣(危險(xiǎn)行為,,請(qǐng)勿模仿!),。
2009 年,,19 歲的王興興迎來(lái)了人生的又一轉(zhuǎn)折點(diǎn)——高考,憑借扎實(shí)的數(shù)理化基礎(chǔ),,他成功考入浙江理工大學(xué)機(jī)械與自動(dòng)控制學(xué)院機(jī)電專業(yè),。
進(jìn)入大學(xué)后,,王興興就像一只找到了方向的飛鳥,目標(biāo)明確,,充滿斗志,,他極少參與娛樂活動(dòng),大部分時(shí)間都沉浸在圖書館的知識(shí)海洋中,。

同年冬天,,大一的他初次接觸單片機(jī)(MCU),便被這個(gè)小小的芯片所蘊(yùn)含的巨大能量深深吸引,,他毫不猶豫地用自己的零花錢,,購(gòu)置了一塊幾十元的Arduino板,開啟了他在電子世界的探索之旅,。
大一寒假,,王興興的熱情愈發(fā)高漲,他又購(gòu)入十多個(gè)9g舵機(jī),,決定挑戰(zhàn)制作一個(gè) 14 自由度雙足人形機(jī)器人,。
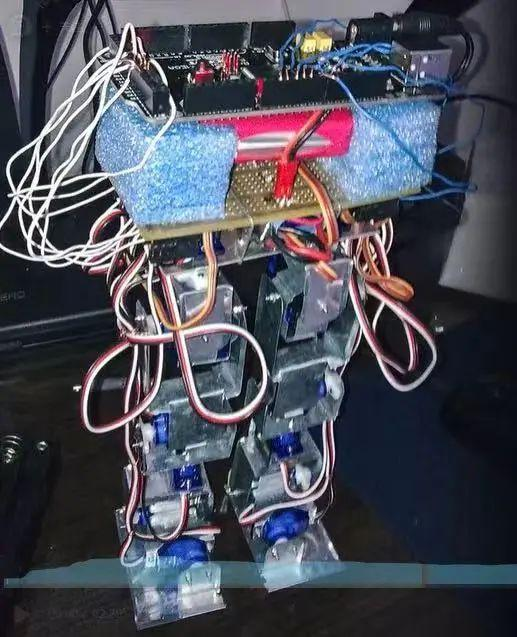
▲王興興大一時(shí)做出的雙足機(jī)器人
從2009 年12月到2010年3月,他陸續(xù)上傳多個(gè)雙足機(jī)器人的設(shè)計(jì),、調(diào)試視頻,,向世人展示他的成果。不僅如此,,他還憑借自己的努力,,申請(qǐng)到了大學(xué)生科研經(jīng)費(fèi) 1 萬(wàn)元,為他的科研之路提供了有力的支持,。

▲王興興制作機(jī)器人的過(guò)程
步入大學(xué)后的王興興,,就像一顆正在積蓄能量的種子,在科技的肥沃土壤中努力扎根,,等待著破土而出,、綻放光芒的那一刻。

2010 年,,大一下半學(xué)期,,年僅20歲的他,對(duì)人工智能和神經(jīng)網(wǎng)絡(luò)產(chǎn)生了濃厚興趣,。在計(jì)算機(jī)基礎(chǔ)課上,,他選擇自由選題,提交的作業(yè)中深入討論了大規(guī)模 AI 和神經(jīng)網(wǎng)絡(luò),。
在當(dāng)時(shí),,神經(jīng)網(wǎng)絡(luò)正處于低谷期,是一門相當(dāng)冷門的學(xué)科,,然而王興興卻憑借著敏銳的洞察力,,提前捕捉到了這一領(lǐng)域的潛力,。

同年暑假,王興興全身心投入到 “數(shù)字孿生力反饋設(shè)備” 項(xiàng)目中,,他打造的多自由度力反饋手套,,采用了柔軟且貼合手部的硅膠材質(zhì)作為主體,內(nèi)部嵌入了高精度的力傳感器以及微型電機(jī),。
這些力傳感器能夠精準(zhǔn)捕捉使用者手部的細(xì)微動(dòng)作和用力變化,,而微型電機(jī)則會(huì)根據(jù)接收到的信號(hào),向使用者的手部反饋相應(yīng)的力感,,模擬出真實(shí)觸摸物體時(shí)的阻力,、壓力等感覺。

搭配的 3D 虛擬現(xiàn)實(shí)力交互軟件,,界面設(shè)計(jì)簡(jiǎn)潔直觀,,通過(guò)與力反饋手套的數(shù)據(jù)交互,能夠在虛擬環(huán)境中模擬出各種物體的物理特性,,比如拿起一個(gè)虛擬的杯子,,使用者能通過(guò)手套感受到杯子的重量、材質(zhì)的質(zhì)感等,。
整個(gè)項(xiàng)目從最初的創(chuàng)意構(gòu)思,,到圖紙?jiān)O(shè)計(jì)、零件采購(gòu),、組裝調(diào)試,,王興興都親力親為,憑借著一雙手和滿腔的熱情,,最終成功完成,。

這份專注與執(zhí)著,讓他在校園里嶄露頭角,,也讓一位大學(xué)老師對(duì)他給出了 “有自驅(qū)力” 的評(píng)價(jià),,原因就是王興興帶著自己此前制作的產(chǎn)品,主動(dòng)找到這位老師,,表達(dá)了想要加入相關(guān)實(shí)驗(yàn)室的強(qiáng)烈愿望。
從曾經(jīng)那個(gè)極度內(nèi)向,、容易自我懷疑的偏科學(xué)生,,到如今積極主動(dòng)尋求成長(zhǎng)機(jī)會(huì),王興興憑借對(duì)機(jī)器人的熱愛和超強(qiáng)的動(dòng)手能力,,實(shí)現(xiàn)了性格上的巨大蛻變,,變得更加自信、積極,,開始勇敢地向外探索未知,。

2011 年 4 月,,王興興基于大一暑假的研究項(xiàng)目,申請(qǐng)了人生中的第一個(gè)專利——“實(shí)現(xiàn)手指多自由度力反饋的裝置”,。
這款裝置的設(shè)計(jì)十分精巧,,它針對(duì)人類手指的復(fù)雜運(yùn)動(dòng)特性,設(shè)計(jì)了多個(gè)可活動(dòng)關(guān)節(jié),,每個(gè)關(guān)節(jié)都能獨(dú)立實(shí)現(xiàn)不同方向的轉(zhuǎn)動(dòng)和彎曲,,從而模擬出人類手指的各種精細(xì)動(dòng)作。
裝置內(nèi)部采用了先進(jìn)的傳動(dòng)機(jī)構(gòu),,能夠?qū)㈦姍C(jī)的動(dòng)力高效傳遞到各個(gè)關(guān)節(jié),,實(shí)現(xiàn)精準(zhǔn)的力反饋控制,同年暑假,,他繼續(xù)深耕,,又進(jìn)一步完善了 “靈巧手樣機(jī)”。

▲王興興大學(xué)本科的機(jī)器手作品
這款產(chǎn)品的外觀仿照人類手部的外形設(shè)計(jì),,采用了輕質(zhì)高強(qiáng)度的復(fù)合材料制作手指和手掌部分,,手指關(guān)節(jié)處的驅(qū)動(dòng)裝置采用了微型伺服電機(jī),配合高精度的行星減速器,,能夠提供強(qiáng)大而穩(wěn)定的動(dòng)力輸出,,實(shí)現(xiàn)抓握、捏取,、旋轉(zhuǎn)等多種復(fù)雜動(dòng)作,。
堪稱驚艷得是,其每個(gè)手指擁有 4 個(gè)主動(dòng)自由度,,比后來(lái) 2023 年馬斯克發(fā)布的特斯拉人形機(jī)器人 Optimus 的每個(gè)手指主動(dòng)自由度還多2個(gè),,無(wú)論是拿筆,還是操作小型工具,,它都能模仿得惟妙惟肖,。

▲特斯拉Optimus機(jī)器人
2013 年,23 歲的王興興從浙江理工大學(xué)順利畢業(yè),,他的畢業(yè)論文課題是《一種 BLDC 控制器的研制》,,不過(guò)令人惋惜的是,原本懷揣著考入浙江大學(xué)繼續(xù)深造夢(mèng)想的他,,由于英語(yǔ)單科未過(guò)線,,盡管總分過(guò)線,但他最終被調(diào)劑到上海大學(xué)攻讀研究生,。

即便被調(diào)劑,,王興興仍然滿懷希望地帶著他的這些專利證書去拜訪心儀的導(dǎo)師,卻被告知已經(jīng)沒有名額了。

正當(dāng)王興興一籌莫展,,坐上上海地鐵,,準(zhǔn)備返回杭州時(shí),他接到那位老師的電話,,這位老師愿意幫忙推薦另一位導(dǎo)師賈文川給他,,一切峰回路轉(zhuǎn)。
研一期間,,王興興便展現(xiàn)出了強(qiáng)大的科研實(shí)力,,針對(duì)當(dāng)時(shí)四足機(jī)器人的主流技術(shù)是液壓驅(qū)動(dòng),成本偏高的問(wèn)題,,王興興認(rèn)為,,可以做電驅(qū)動(dòng)的小型高靈活性的四足機(jī)器人,這樣成本就能大幅降低,,這個(gè)想法在當(dāng)時(shí)是很超前的,。
一開始沒有錢,他就拿出自己壓箱底的積蓄,,做了電驅(qū)動(dòng)四足機(jī)器人的一條高動(dòng)態(tài)機(jī)械腿,,這條機(jī)械腿采用了全新的結(jié)構(gòu)設(shè)計(jì),運(yùn)用了碳纖維材料來(lái)減輕重量,,同時(shí)保證了足夠的強(qiáng)度和剛性,。
腿部的關(guān)節(jié)部分配備了先進(jìn)的傳感器,能夠?qū)崟r(shí)監(jiān)測(cè)機(jī)械腿的運(yùn)動(dòng)狀態(tài)和受力情況,。通過(guò)自主編寫的控制算法,,機(jī)械腿可以實(shí)現(xiàn)快速的擺動(dòng)、跳躍等高動(dòng)態(tài)動(dòng)作,,運(yùn)動(dòng)速度和靈活性遠(yuǎn)超同類產(chǎn)品,。
這一成果得到了導(dǎo)師賈文川的高度認(rèn)可,并獲得了一兩萬(wàn)元的科研支持,,而賈文川也成為了王興興科研道路上的引路人,。在賈文川的悉心指導(dǎo)下,王興興成功開發(fā)出 XDog 電驅(qū)動(dòng)四足機(jī)器人,,開創(chuàng)了低成本,、高性能四足機(jī)器人技術(shù)方案的先河。
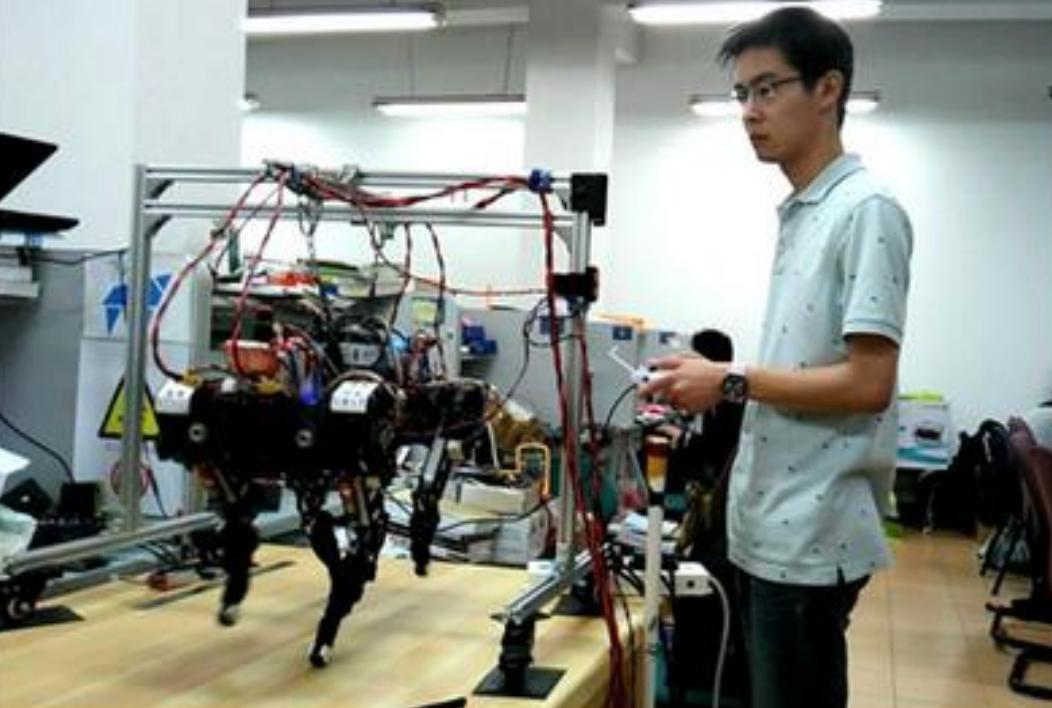
2015年,,25 歲的王興興面臨碩士畢業(yè),,但他的機(jī)器狗項(xiàng)目才完成一半,一旦畢業(yè),,意味著之前的努力付諸東流。
為了能讓項(xiàng)目達(dá)到理想的狀態(tài),,他毅然主動(dòng)申請(qǐng)延期畢業(yè),,全身心投入到機(jī)器狗的研發(fā)中,,在此期間,王興興還公布了XDog的電驅(qū)動(dòng)方案,。
▲在上海大學(xué)實(shí)驗(yàn)室的王興興和背后的XDog
要知道波士頓動(dòng)力直到 2016 年才公布電驅(qū)動(dòng)方案,,此前一直采用液壓方案,王興興卻比他們?cè)绻_了近一年,。
眼看著同學(xué)們紛紛找到了工作,,王興興不急那是假的,好在那時(shí)剛好上海有一個(gè)創(chuàng)業(yè)大賽,,最高獎(jiǎng)金20萬(wàn)元,。
于是他帶著XDog參加了五六次比賽答辯,最終拿了二等獎(jiǎng),,8萬(wàn)元獎(jiǎng)金,,這也就是王興興的第一桶金。

▲王興興在碩士期間制作的XDog
不過(guò),,即便是拿到了獎(jiǎng),,當(dāng)時(shí)也無(wú)人看好他的產(chǎn)品,屢屢碰壁的王興興后來(lái)就在2016年去了大疆上班,,或許因?yàn)檫€抱有一絲希望,,王興興把以前制作機(jī)器人的視頻上傳到優(yōu)酷等視頻網(wǎng)站。

▲王興興在優(yōu)酷上傳的視頻
誰(shuí)知視頻突然就火了,,不僅有客戶表達(dá)購(gòu)買意向,,更有投資者拋出橄欖枝,還在試用期的王興興幾乎沒有任何猶豫地辭掉了工作,,回杭州創(chuàng)辦了宇樹科技有限公司,,兼任CEO和CTO,專注研究低成本的四足機(jī)器人產(chǎn)品,。
雖然讀書時(shí)的X Dog上的不少技術(shù)可以沿用,,但也都需要做迭代升級(jí),工作量不小,,幾乎快一年,,宇樹科技的首款機(jī)器狗——萊卡狗才問(wèn)世。

▲萊卡狗名字來(lái)自前蘇聯(lián)向太空送去的一只狗狗的名字
萊卡狗的外觀設(shè)計(jì)參考了真實(shí)犬類的體型比例,,線條流暢,,充滿動(dòng)感,機(jī)身采用高強(qiáng)度鋁合金材質(zhì),,搭載了宇樹自主研發(fā)的先進(jìn)電驅(qū)動(dòng)系統(tǒng),,擁有12個(gè)自由度,能夠靈活地控制四肢的運(yùn)動(dòng)。

萊卡狗在全球范圍內(nèi)反響不錯(cuò),,接下來(lái)訂單量節(jié)節(jié)攀升,,曾經(jīng)那個(gè)不被看好的年輕人終于和他的機(jī)器狗,一起被大家看見了,。

2018 年,,宇樹科技獲得安創(chuàng)科技投資、變量資本的天使輪融資,,此后,,王興興和他的團(tuán)隊(duì)一路高歌猛進(jìn),次年,,宇樹科技發(fā)布四足機(jī)器人萊卡狗Pro,。

萊卡狗Pro相比萊卡狗,采用了更高效的電機(jī)和大容量的電池,,續(xù)航時(shí)間也大幅提升,,還新增了激光雷達(dá)傳感器,能夠更精準(zhǔn)地識(shí)別周圍物體的形狀,、距離和位置信息,。同年12月,宇樹科技獲紅杉資本中國(guó)基金,、德迅投資的 PreA 輪融資,。

此時(shí)的宇樹科技可以說(shuō)是已經(jīng)嶄露頭角,2020年10月,,春晚編導(dǎo)向王興興伸出橄欖枝,,邀請(qǐng)他帶著四足機(jī)器人登上2021年央視牛年春晚舞臺(tái)。

在對(duì)機(jī)器人進(jìn)行了針對(duì)性的優(yōu)化后,,四足機(jī)器人“奔奔” 成功登上可2021年春晚舞臺(tái),,它身披喜慶的裝飾,做出各種精彩的動(dòng)作,,吸引了全國(guó)觀眾的目光,,王興興也因此接受了央視主持人王冰冰的采訪,宇樹科技的知名度飆升,。

2021年夏,,當(dāng)宇樹科技推出首款伴隨型仿生機(jī)器人Go1時(shí),可能連創(chuàng)始人王興興自己都沒想到,,這個(gè)能模仿寵物般歪頭示好的小家伙,,即將開啟中國(guó)智能機(jī)器人走向世界的征程。
Go1獨(dú)特的互動(dòng)設(shè)計(jì)打破了傳統(tǒng)工業(yè)機(jī)器人的冰冷形象——它不僅聽得懂30種語(yǔ)音指令,,還能通過(guò)靈活的肢體擺動(dòng)傳遞情緒,,這種擬態(tài)交互讓科技愛好者們眼前一亮,。
此后兩年,王興興團(tuán)隊(duì)迎來(lái)高光時(shí)刻的密集爆發(fā),。2023年春天,,宇樹機(jī)器狗登上美國(guó)超級(jí)碗的穹頂球場(chǎng),在數(shù)萬(wàn)觀眾注視下完成精準(zhǔn)的群體舞蹈,。

▲宇樹機(jī)器狗亮相2023年超級(jí)碗賽前表演
而真正展現(xiàn)技術(shù)深度的,是杭州亞運(yùn)會(huì)上那些穿梭于賽場(chǎng)的身影——它們既能為標(biāo)槍運(yùn)動(dòng)員回收器械,,又能化身導(dǎo)盲犬為視障選手引路,,這種多場(chǎng)景適應(yīng)能力讓業(yè)界看到服務(wù)型機(jī)器人的巨大潛力。

技術(shù)迭代的腳步從未停歇,,2023年8月面世的H1人形機(jī)器人,,標(biāo)志著宇樹正式進(jìn)軍雙足機(jī)器人領(lǐng)域。

▲王興興親自上腳測(cè)試H1的平衡性
這款真人大小的“鋼鐵之軀”不僅能流暢完成跑跳,、負(fù)重等基礎(chǔ)動(dòng)作,,其搭載的神經(jīng)形態(tài)芯片更賦予了自主決策能力。
資本市場(chǎng)的嗅覺總是敏銳的,。2024年初央視的專題報(bào)道猶如一劑強(qiáng)心針,,兩個(gè)月后美團(tuán)領(lǐng)投的10億元融資創(chuàng)下行業(yè)紀(jì)錄。
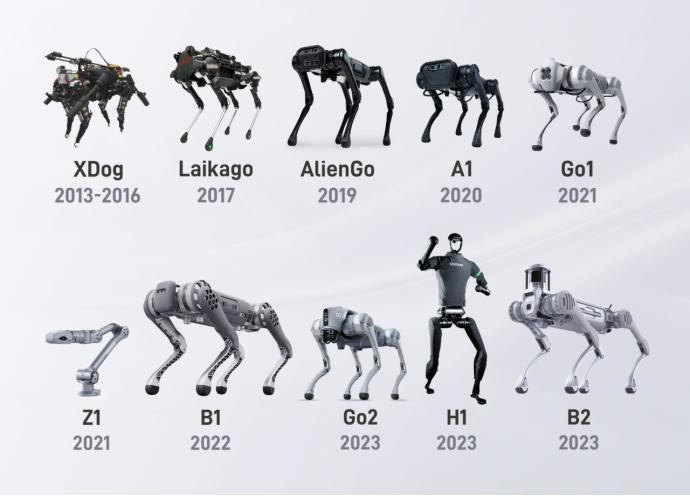
▲宇樹科技旗下系列產(chǎn)品
獲得資本加持的宇樹科技隨即推出G1人形機(jī)器人,,這款售價(jià)下探至9.9萬(wàn)元的產(chǎn)品在抓握精度和續(xù)航時(shí)長(zhǎng)上均有突破,,預(yù)售首日即斬獲超三千臺(tái)訂單。

截至2024年底,,宇樹科技的專利墻已掛滿330多項(xiàng)技術(shù)認(rèn)證,,當(dāng)冬季的B2-W四足機(jī)器狗視頻引發(fā)全網(wǎng)熱議時(shí),馬斯克在社交平臺(tái)直接點(diǎn)評(píng)道:“未來(lái)戰(zhàn)爭(zhēng)將是無(wú)人機(jī)戰(zhàn)爭(zhēng),?!?/p>

2025年1月19日,當(dāng)王興興在英偉達(dá)迎春宴會(huì)上與黃仁勛并肩而立時(shí),,機(jī)器人走進(jìn)千家萬(wàn)戶的煙火氣的愿景,,已在悄然照進(jìn)現(xiàn)實(shí)。
這位剛宣布企業(yè)年度業(yè)績(jī)翻倍,、全球四足機(jī)器人市場(chǎng)占有率突破60%的創(chuàng)業(yè)者,,此刻的目光早已投向更富挑戰(zhàn)的領(lǐng)域——讓冰冷的機(jī)械軀體演繹出東方美學(xué)的溫度。

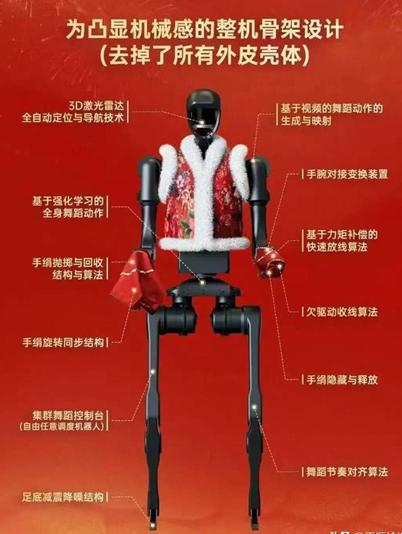
2025年1月28日,,蛇年春晚的《秧BOT》上,,十二臺(tái)身著紅花襖的H1機(jī)器人手持紅綢魚貫而出,隨著嗩吶聲起,,這些“鋼鐵秧歌隊(duì)”竟踩著鼓點(diǎn)扭出地道的十字步,。

當(dāng)領(lǐng)舞機(jī)器人將手絹拋向空中完成360度云里翻時(shí),,觀眾席爆發(fā)的驚呼聲甚至蓋過(guò)了音樂——這不僅是全球首次全自主人形機(jī)器人集群表演,更是一場(chǎng)精密到毫秒的科技博弈,。
要知道,,當(dāng)領(lǐng)舞機(jī)器人將紅綢拋向3米高空完成云里翻時(shí),其踝關(guān)節(jié)六維力傳感器承受的瞬時(shí)沖擊力達(dá)到280N,,相當(dāng)于承受自身體重1.8倍的動(dòng)態(tài)載荷,。

而每臺(tái)H1的機(jī)械手指以每秒5次的頻率微調(diào)著力道,這項(xiàng)源自2023年“多模態(tài)柔性抓取系統(tǒng)”專利的技術(shù),,能讓鋼鐵手指既能以0.05牛級(jí)的精度捏住薄絹,,又能承受2公斤的瞬時(shí)拉力。
當(dāng)最后一方紅綢飄落,,觀眾席持續(xù)數(shù)十秒的掌聲,,穿越了北京的夜空,與慕尼黑工廠里H1機(jī)械臂的運(yùn)轉(zhuǎn)聲,、西昌衛(wèi)星發(fā)射中心的指令聲交織成曲,,成為中國(guó)智造在21世紀(jì)中葉奏響的科技長(zhǎng)歌。

如今,,這支王興興率領(lǐng)的中國(guó)機(jī)器人團(tuán)隊(duì),,正以其獨(dú)有的技術(shù)哲學(xué),重新定義著人機(jī)共生的未來(lái)圖景,。




